Fault-tolerant Flight Control and Guidance Systems
Practical Methods for Small Unmanned Aerial Vehicles
(Sprache: Englisch)



This book offers a complete overview of fault-tolerant flight control techniques. Discussion covers the necessary equations for the modeling of small UAVs, a complete system based on extended Kalman filters, and a nonlinear flight control and guidance system.
Jetzt vorbestellen
versandkostenfrei
Buch (Gebunden)
160.49 €
![]() 80 DeutschlandCard Punkte
sammeln
80 DeutschlandCard Punkte
sammeln
- Lastschrift, Kreditkarte, Paypal, Rechnung
- Kostenlose Rücksendung
- Ratenzahlung möglich
Produktdetails
Produktinformationen zu „Fault-tolerant Flight Control and Guidance Systems “
This book offers a complete overview of fault-tolerant flight control techniques. Discussion covers the necessary equations for the modeling of small UAVs, a complete system based on extended Kalman filters, and a nonlinear flight control and guidance system.
Klappentext zu „Fault-tolerant Flight Control and Guidance Systems “
Unmanned aerial vehicles (UAVs) offer an incomparable means of gathering intelligence and carrying out missions without needing an onboard human pilot. The benefits are considerable in terms of cost, efficiency, and reduced pilot risk.In order to complete a mission efficiently and with a high level of safety and security, the following key design points must be met:
- the flight control system must be robust against the aircraft's model uncertainties and external disturbances;
- an efficient fault detection and isolation (FDI) system should be capable of monitoring the health of the aircraft; and
- the flight control and guidance system should be reconfigurable depending on actuator fault occurrence or aircraft damage, and should be able to avoid obstacles.
Fault-tolerant Flight Control and Guidance Systems addresses all of these aspects with a practical approach following three main requirements: being applicable in real-time; highly computationally efficient; and modular. The text provides:
- an overview of fault-tolerant flight control techniques;
- the necessary equations for the modeling of small UAVs;
- a complete nonlinear FDI system based on extended Kalman filters; and
- a nonlinear flight control and guidance system.
The book is written in a didactic style with many figures and diagrams making it suitable not only for academic researchers and practicing engineers but also graduate students working in the fields of fault detection techniques and the automatic control of UAVs.
Unmanned aerial vehicles (UAVs) offer a means of gathering intelligence and carrying out missions. The benefits are considerable in terms of cost, efficiency, and reduced pilot risk.
To complete a mission efficiently and with a high level of safety and security: the flight control system must be robust against model uncertainties and external disturbances; an efficient fault detection and isolation system; the flight control and guidance system should be reconfigurable depending on actuator fault occurrence or aircraft damage, and able to avoid obstacles.
This book addresses all of these aspects with a practical approach following three main requirements: applicability in real-time; computational efficiency; and modularity. The text provides: an overview of fault-tolerant flight control techniques; the necessary equations for the modeling of small UAVs; a complete nonlinear fault detection and isolation system based on extended Kalman filters; a nonlinear flight control and guidance system.
To complete a mission efficiently and with a high level of safety and security: the flight control system must be robust against model uncertainties and external disturbances; an efficient fault detection and isolation system; the flight control and guidance system should be reconfigurable depending on actuator fault occurrence or aircraft damage, and able to avoid obstacles.
This book addresses all of these aspects with a practical approach following three main requirements: applicability in real-time; computational efficiency; and modularity. The text provides: an overview of fault-tolerant flight control techniques; the necessary equations for the modeling of small UAVs; a complete nonlinear fault detection and isolation system based on extended Kalman filters; a nonlinear flight control and guidance system.
Inhaltsverzeichnis zu „Fault-tolerant Flight Control and Guidance Systems “
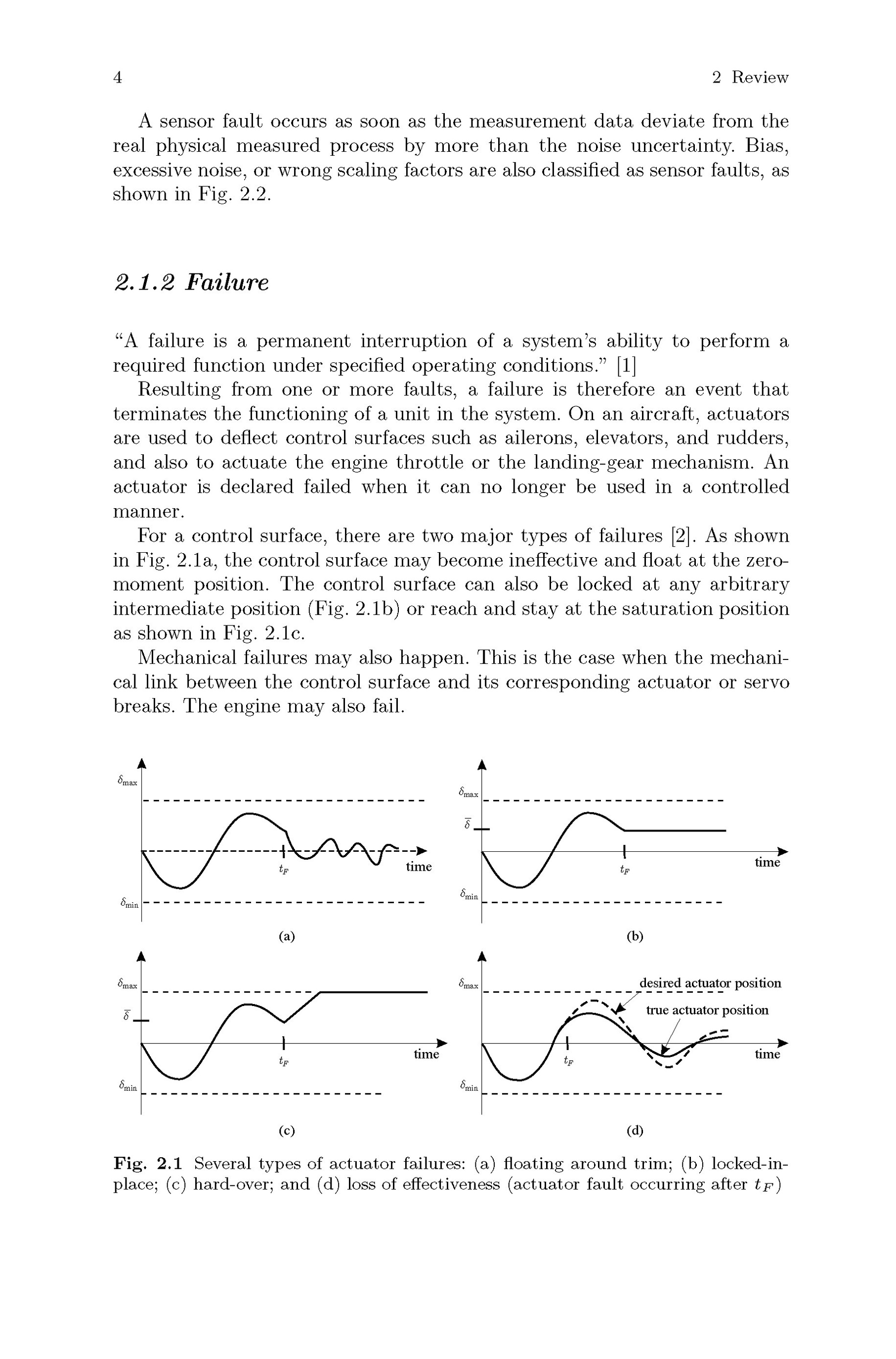
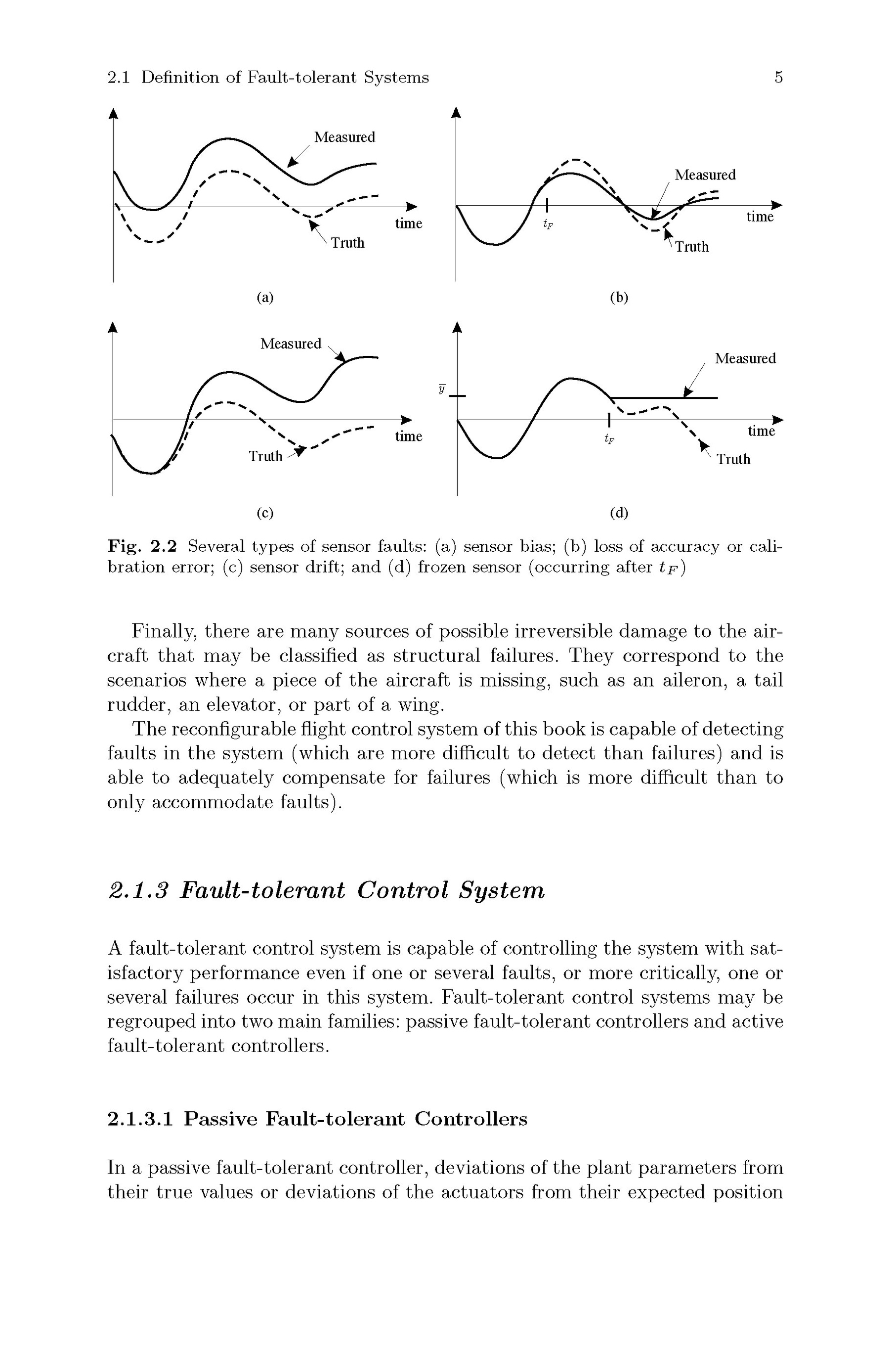
Review.- Nonlinear Aircraft Model.- Nonlinear Fault Detection and Isolation System.- Control Allocation.- Nonlinear Control Design.- Autopilot for the Longitudinal Motion.- Autopilot for the Lateral Motion.- Reconfigurable Guidance System.- Evaluation of the Reduction in the Performance of a UAV.- Conclusions and Outlook.
Autoren-Porträt von Guillaume J. J. Ducard
Between 2002 and 2004, Guillaum Ducard worked with the team designing the Pac-Car 2, designing hardware and control software for embedded fuel cell systems. The vehicle holds the world record for fuel economy. Since 2004, Doctor Ducard has been interested in hardware and software for unmanned aerial vehicles including fixed-wing aeroplanes, high-altitude atmospheric air ships and quadricopters. He received his Dr.Sc. degree from ETH in 2007. His current research involves the design of navigation algorithms, flight control and guidance systems for quadricopters. Guillaume Ducard is a member of the IEEE and of the AIAA.
Bibliographische Angaben
- Autor: Guillaume J. J. Ducard
- 2009, XXII, 268 Seiten, Maße: 16,4 x 24,3 cm, Gebunden, Englisch
- Verlag: Springer, Berlin
- ISBN-10: 1848825609
- ISBN-13: 9781848825604
Sprache:
Englisch
Kommentar zu "Fault-tolerant Flight Control and Guidance Systems"
0 Gebrauchte Artikel zu „Fault-tolerant Flight Control and Guidance Systems“
| Zustand | Preis | Porto | Zahlung | Verkäufer | Rating |
|---|
Schreiben Sie einen Kommentar zu "Fault-tolerant Flight Control and Guidance Systems".
Kommentar verfassen